

RoboCon 2025 Dragon's Lair
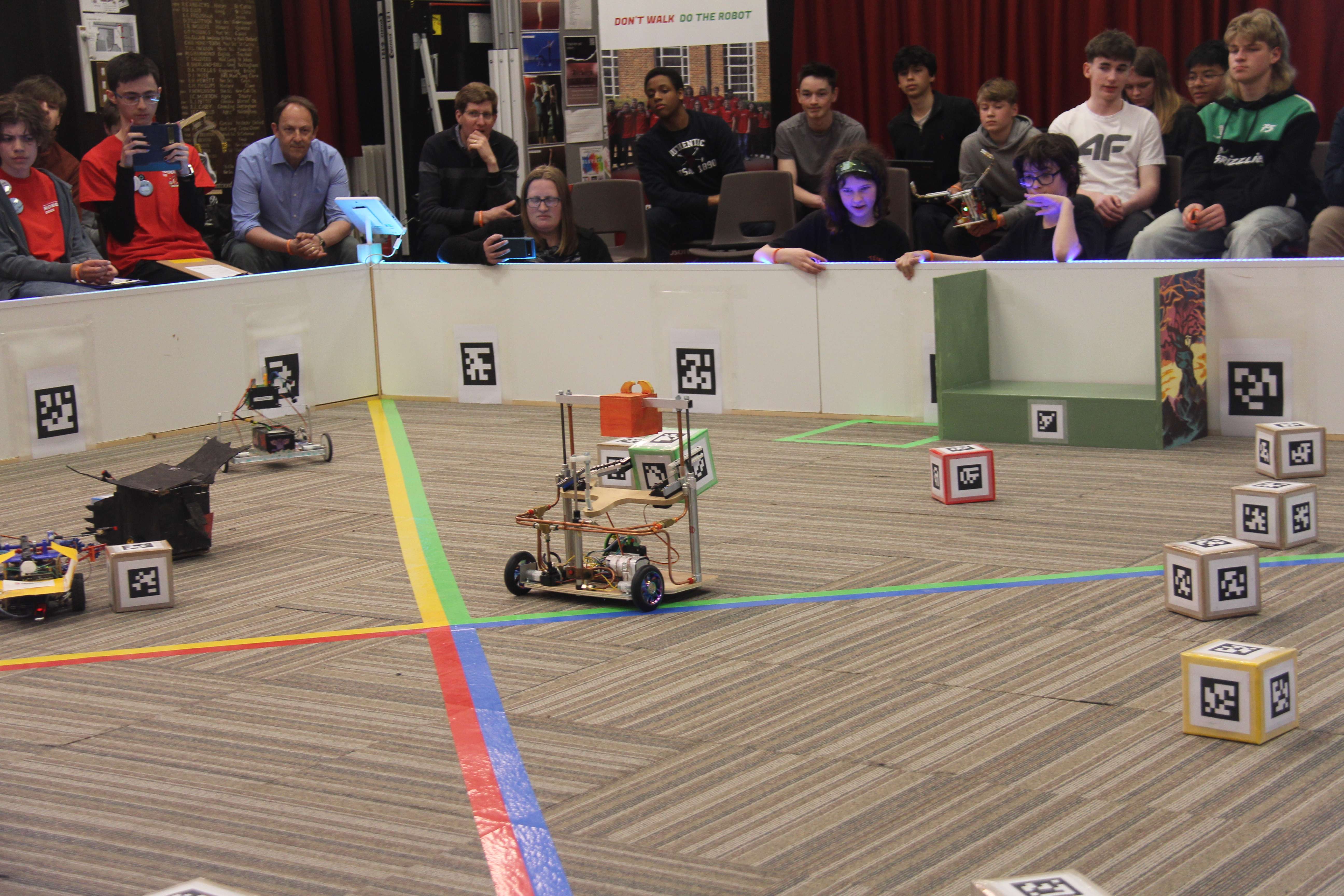
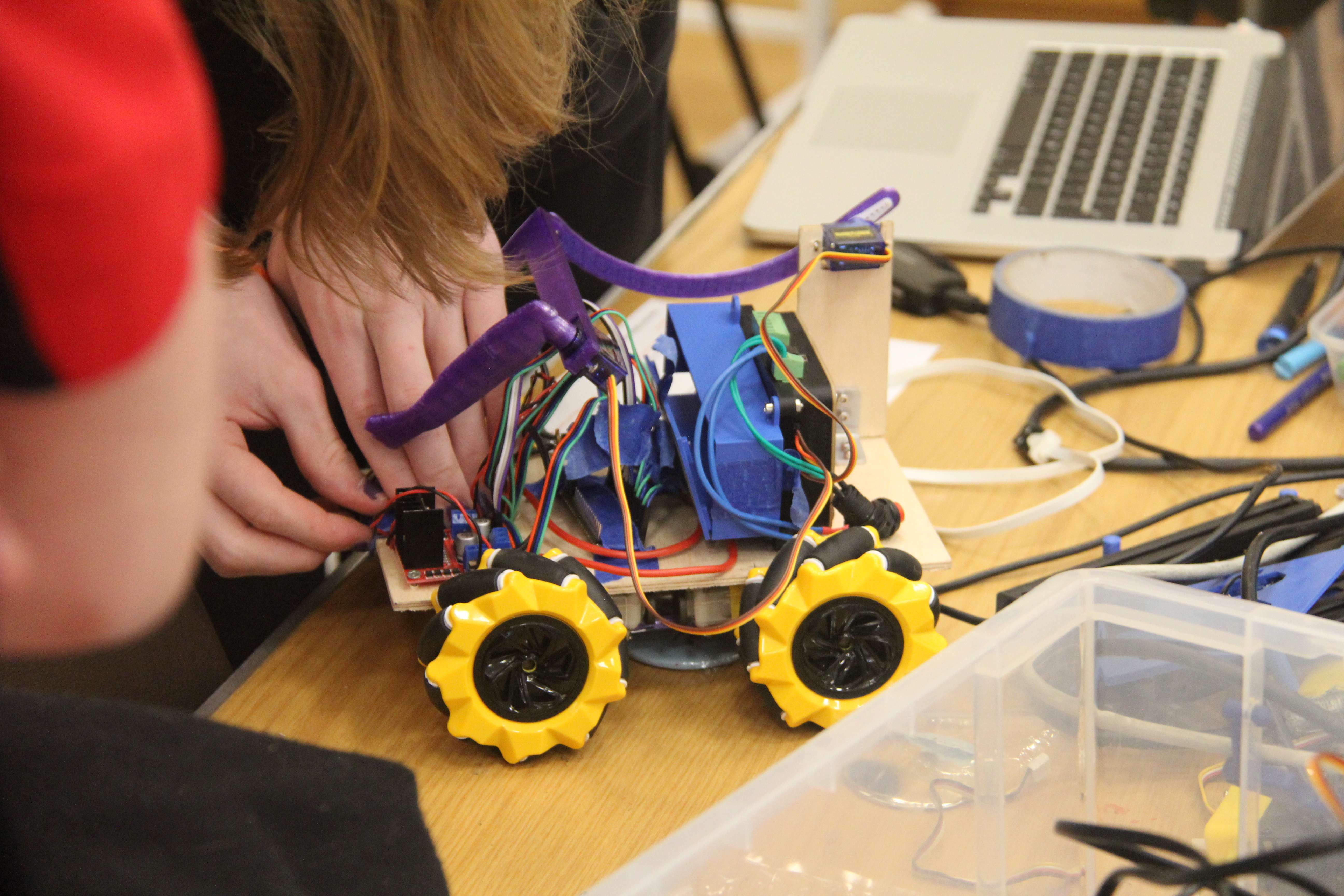
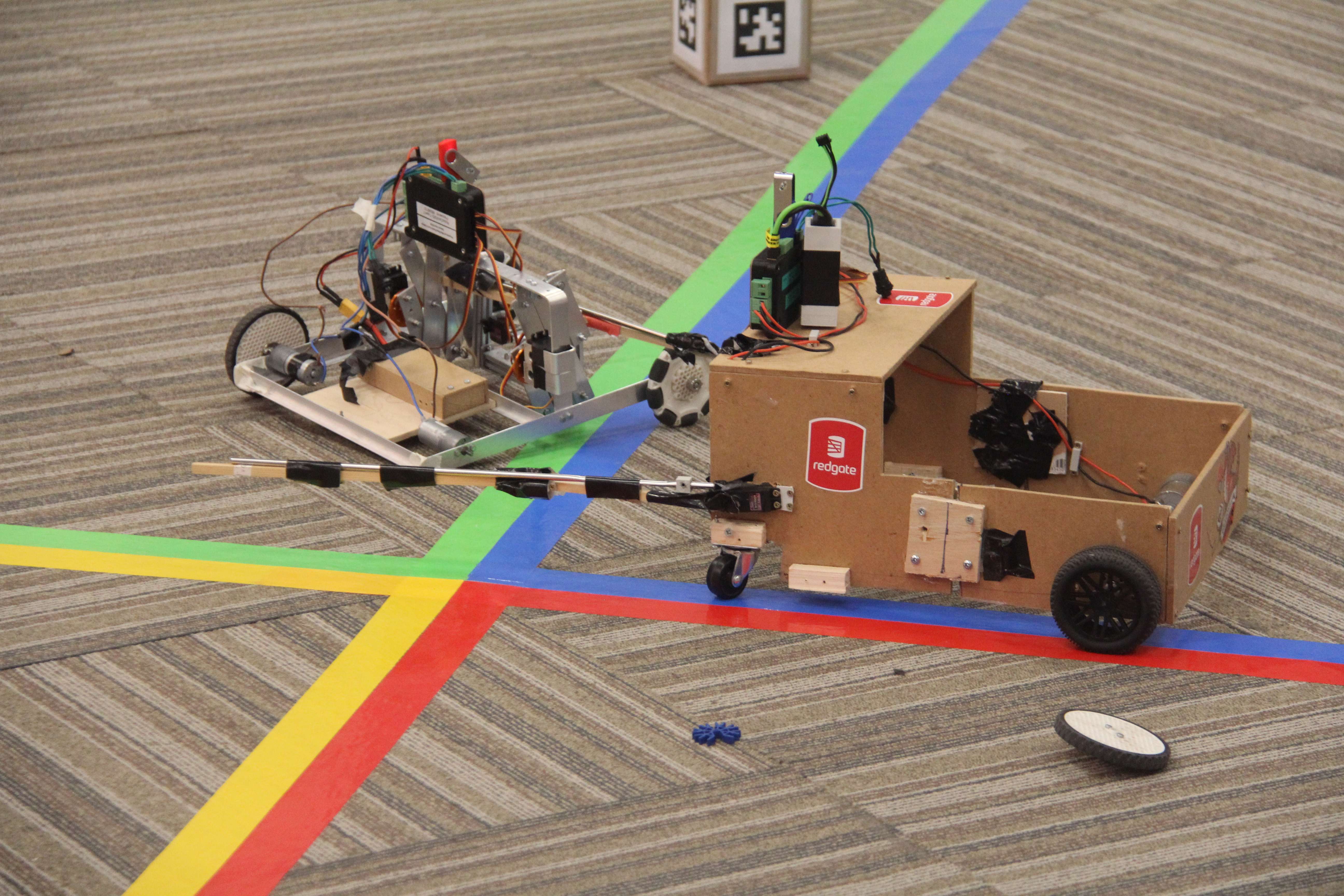
Congratulations to all the teams who competed in our last competition, RoboCon 2025 - Dragon's Lair! Read about the competition full of sheep, gems and epic robot dragons!
Read About It...
Latest News
RoboCon 2025 Review
Read about this year's competition full of sheep, gems and epic robot dragons!
Read More...Last updated: 14 April 2025

A Fiery RoboCon 2025 Kick-Off
Today we launched RoboCon 2025 with our fiery new competition!
Read More...Last updated: 2 November 2024

RoboCon 2024 Review
Read all about this year's "Hot Potato" themed competition, the results, and the highlights from the event!
Read More...Last updated: 11 April 2024